

GMV y SENER colaboran con la Universidad Carlos III para la creación de un nuevo sistema de localización y agarre de satélites
18/10/2010 (Infodefensa.com) Madrid.- El Laboratorio de Robótica de la Universidad Carlos III de Madrid (UC3M), en colaboración con las compañías españolas GMV y SENER, ha desarrollado un proyecto de “Acoplamiento y Agarre de Satélites mediante Sistemas Robóticos basado en Visión (ASIROV)”, que permitirá capitanear satélites de forma autónoma para su captura, posibilitando la programación de futuros exploradores espaciales para reparar e incluso prolongar la vida útil de otros que se encuentren en funcionamiento.
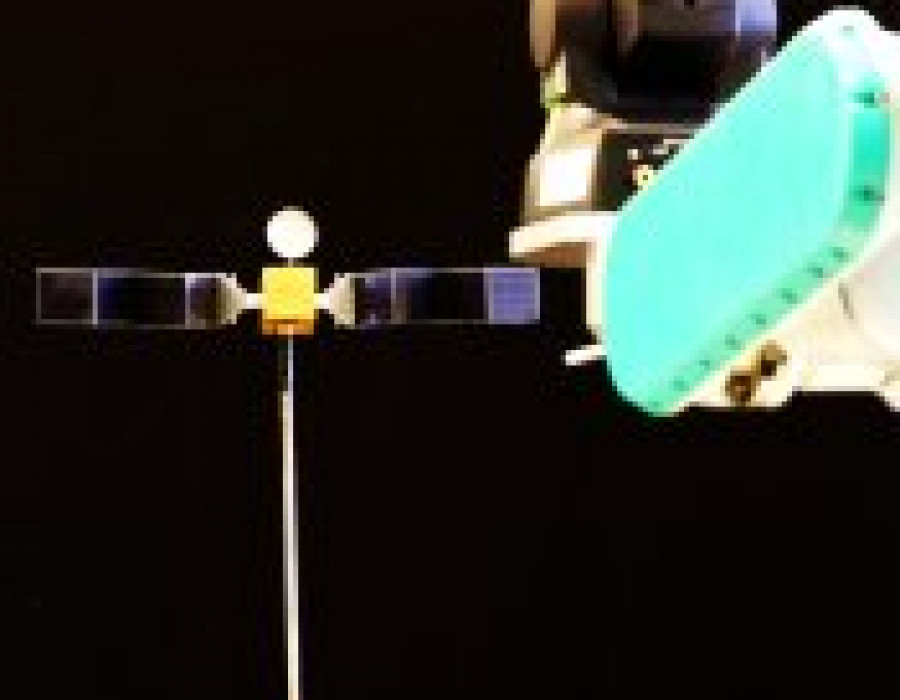
El acercamiento y agarre de los artefactos será posible gracias a la utilización de un vehículo de búsqueda o chaser, que realizará esta función de manera autónoma. Los ingenieros de GMV han colaborado en la producción del sistema; por su parte, SENER coopera en la exploración de vías para extender la vida útil de los satélites hasta los doce años.
“Cada día hay una mayor necesidad de proporcionar servicios de mantenimiento a los satélites sin recurrir a misiones tripuladas, que son muy costosas y conllevan riesgos, y la robótica es la respuesta más natural a eso”, explica el responsable de la investigación, Mohamed Abderrahim.
“Se pretende realizar todas las fases de una misión de inspección y mantenimiento de satélites que necesiten servicio, mediante otro vehículo autónomo dotado de un sistema de agarre y captura robótico”, comenta Abderrahim. Los algoritmos de navegación, basados en técnicas de visión, identificarán el objeto buscado entre varios que se presentan, estimando su posición y orientación.
En un principio, se desarrollaron algoritmos de visión que usaban los vértices del modelo del satélite como puntos característicos. Después, se perfeccionó la técnica para asociar la información que rodea los puntos de interés de la imagen a los del modelo. “Esta última técnica es muy robusta ante el ruido, cambios de fondo y variación de iluminación, y la rapidez de funcionamiento del algoritmo permite su implementación en tiempo real”, destaca el profesor.
Desarrollo de nuevas  estrategias de posición, fuerza y visión
estrategias de posición, fuerza y visión
Cada año aumenta el número de satélites y vehículos espaciales lanzados al espacio. Muchos de ellos serán capaces de desarrollar la misión para la que han sido creados, mientras que otros no podrán completarla, debido a anomalías en su funcionamiento, generando así una grave pérdida económica y convirtiéndose en un riesgo potencial para los demás vehículos.
La inspección y el servicio de una nave espacial incapacitada debe ser realizada por otra nave, que consiga llevar a cabo la proximidad y ejecutar las maniobras necesarias para el acercamiento y el análisis visual. La operación termina con la reparación del artefacto por uno o más brazos robóticos de inspección de vehículos.
El Proyecto ASIROV consiste en el desarrollo de técnicas y estrategias para la aproximación y la captura de los satélites en movimiento, con la visión por ordenador y nuevos algoritmos de control híbrido (posición / fuerza / visión).
Con el fin de obtener resultados fiables, la plataforma experimental RISANAR será modificada para dar cabida a un sensor de fuerza en el efector final del robot y un mecanismo que simulará el acoplamiento del satélite y las últimas fases del escenario de la misión.
La correcta ejecución de este proyecto permitirá la obtención de la tecnología para la próxima generación de satélites, lo que les posibilitará la identificación de sus objetivos y la capacidad de acercamiento autónomo.
El desarrollo del proyecto se llevará a cabo en un banco de pruebas experimentales con un manipulador 3D de objetos en movimiento, cuyos resultados son directamente adaptables en aplicaciones industriales y de servicios, con el fin de realizar operaciones de manipulación o en su interacción física con el medio ambiente. El proyecto ha sido financiado por el Ministerio de Educación y Ciencia.



:")


