

Chile implementará radares y drones para mejorar el control en el área marítima
La Dirección General del Territorio Marítimo y de Marina Mercante (Directemar) de la Armada de Chile está en la etapa de desarrollo del Proyecto Vigilum para mejorar la conciencia situacional marítima (MDA, por su sigla en inglés) y los procesos de Vigilancia, Control, Alerta y Respuesta en un área marítima de 3,2 millones de kms2.
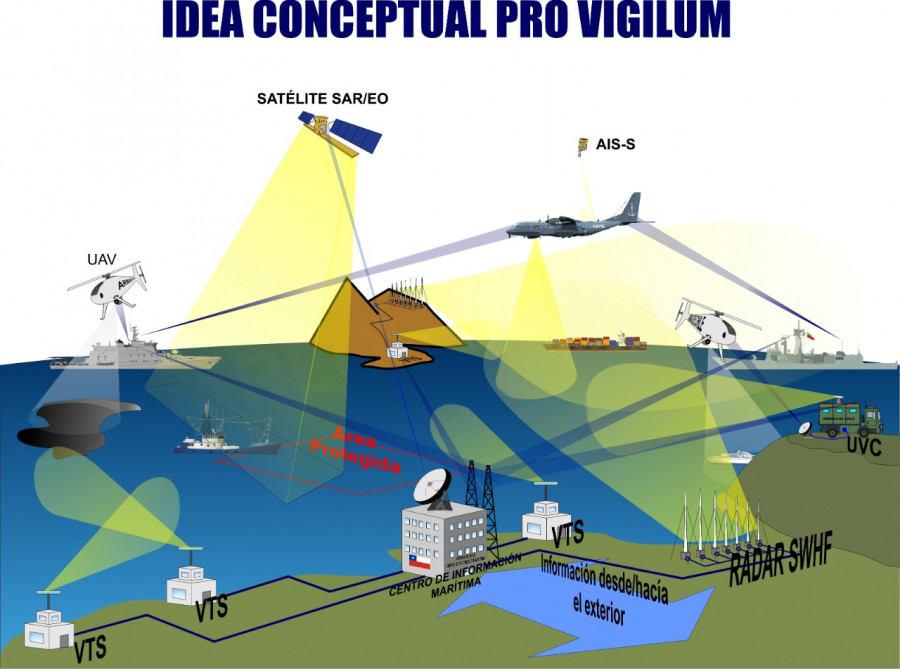
El proyecto Vigilum considera la implementación de sensores como radares y drones de diferentes capacidades y alcances como también una infraestructura de datos geoespaciales/operativos que permita articular, sustentar y mejorar esos procesos en el área marítima de responsabilidad nacional.
Esta iniciativa reviste un gran desafío para la institución ya que el país está a cargo de más 26,5 millones de kms de área SAR, 4.400 km de línea de costa, el Estrecho de Magallanes y el Paso Drake, y debe enfrentar diversas problemáticas como la pesca ilegal, el tráfico de drogas e ilícitos a los que no se puede dar una solución con un único curso de acción.
La institución efectuó un proceso de Solicitud de Información (RfI) a 15 empresas nacionales y extranjeras como parte del Estudio de Perfil del proyecto y está a la espera de la aprobación y financiamiento del Ministerio de Defensa Nacional.
Falencias detectadas
En el levantamiento de información del proyecto, se verificó la falta de integración de fuentes de información, falta de herramientas de compilación automatizadas y herramienta de análisis predictivo del Panorama Marítimo, limitada transferencia de información con mandos y unidades participantes en las operaciones y mínima capacidad de detectar naves no colaborativas.
Directemar identificó además una limitada disponibilidad de personal calificado para operar sistemas, limitada transferencia de información con agentes externos y organizaciones extrainstitucionales, limitaciones en el sistema Grafimar, limitado acceso y disponibilidad de información de redes e inadecuada infraestructura y equipamiento para el cumplimiento de funciones.
En el caso de las embarcaciones no colaborativas, los principales problemas detectados son que no informan su posición, alta probabilidad de comisión de delitos u otras actividades en contra de los intereses del Estado y requieren acciones para su detección como el envío de aeronaves de exploración aeromarítima. Por otra parte, algunas naves colaborativas informan datos en forma incorrecta y de manera intencionada y el volumen de datos requiere una automatización de los procesos de información.
Nuevas tecnologías
El proyecto Vigilum mejora las capacidades de adquisición/recopilación de información e incorpora las capacidades de fusión, análisis, mantención y diseminación de la información, que actúan como capacidades habilitantes de los procesos de Vigilancia, Control, Alerta y Respuesta y permiten dar cumplimiento a la normativa nacional y acuerdos internacionales vigentes.
La iniciativa considera una solución de tipo Network-Centric con sensores de diferente naturaleza (activo/pasivo) montados sobre diferentes tipos de plataformas, capacidad de escalabilidad, fusión de datos desde fuentes propias o abiertas, análisis automático de grandes volúmenes de información, análisis predictivo y tolerancia de fallas en sistema.
La información recopilada por los sensores será procesada en un Centro de Fusión de Datos o Data Center, el cual además se encargará de la operación de los enlaces de comunicaciones, servicios de imágenes satelitales y servicios ya en uso en la institución como AIS o LRIT.
Radares y drones
Entre las alternativas preliminares que se podrían incorporar, destacan los radares HF de propagación superficial (SWHFR) con 120° de cobertura azimutal y un alcance hasta 200 millas náuticas. Respecto a sus áreas ciegas, éstas serían cubiertas con otros sensores.
El proyecto Vigilum contempla radares de vigilancia costera para la detección de embarcaciones menores, buzos/nadadores y peatones, tanto en modalidad fija y portátil, y con alcances que varían entre 12, 24 y 48 millas náuticas.
Los sensores serían complementados por vehículos no tripulados de despegue y aterrizaje vertical (VTOL) con enlace de trasmisión datalink de hasta 200 kilómetros, programación de misiones autónomas y diferentes tipos de carga de pago como radares o cámaras.
El proyecto también considera también vehículos aéreo no tripulado de media altitud y largo alcance (MALE) que funcionarían de manera complementaria con un VTOL y los otros sensores. Estos aparatos entregan gran cobertura espacial por misión, poseen una autonomía aproximada de 30 horas y cuentan con enlaces datalink y diferentes tipos de carga de pago.






